2010 – Breakaway
2010 was a great year to play Breakaway! We were excited to build a robot with a kicker and we experimented with some fabulous mechanical improvements as we debuted our full-out crab drive machine. Each wheel was independently steered and driven. We could achieve very fast speed and were able to spin well. We paired this with some amazing programming from our students and were able to allow the robot to rotate and translate linearly simultaneously. This was done by the resolution of both component vectors. We had an anti-wind-up algorithm to prevent the harnesses on the wheels from wrapping themselves into a knot. We attended Traverse City District, West Michigan District, Michigan State Championship and the World Championship. We won the Innovation in Controls award in TC, and we won the coveted Engineering Inspiration Award at West Michigan, the State Championship, and the Championship! That win allows us to pre-qualify for nationals, so it’s “Meet Me in St. Louis” time for the WOBOTS!
FIRST FACTS:
Number of Teams: 1811
Events Held:
44 Regionals
7 Districts
1 State Championship
1 World Championship
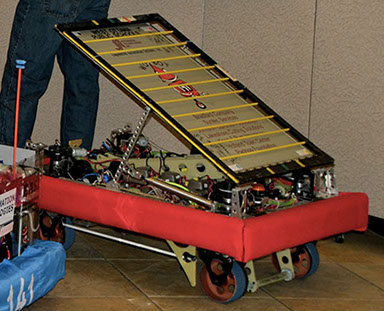
Robot Size:
130 pounds
Fit inside a 30” x 36” x 5’ space
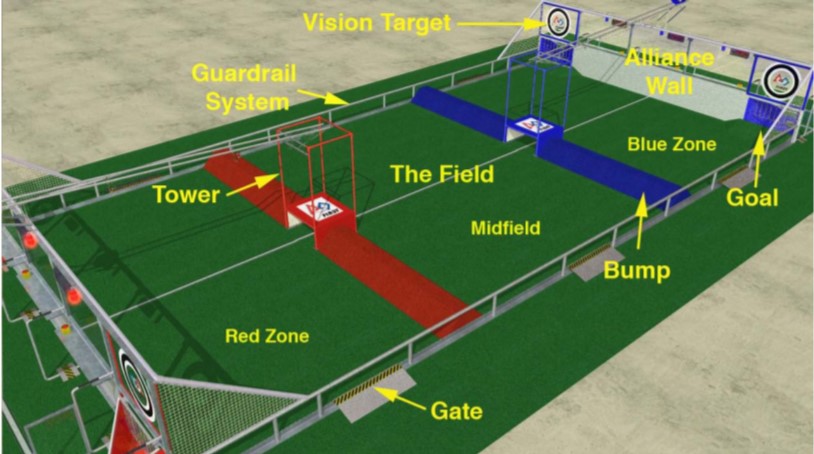
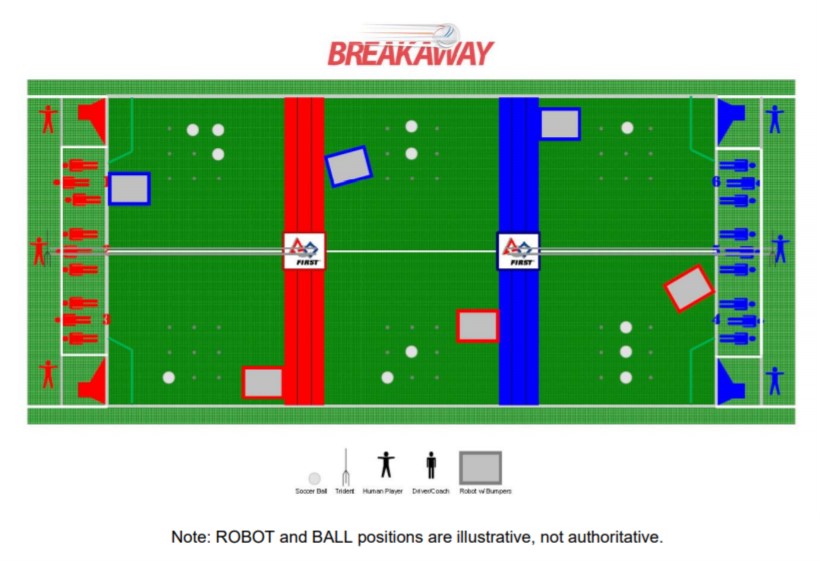
Brief Game Description:
There are two “bumps” in the field that divide it into three zones. Goals are located at the corners of the field, and extend behind the alliance wall and adjacent to the player stations. After goals are scored, human players must pick up the balls and pass them to the center of the alliance station to be placed on a ball return rack, after which they will re-enter play at midfield. Teams are penalized if balls are not re-entered within a set time limit. Robots direct soccer balls into goals, traverse “bumps” in field. At the end of the match, bonus points are awarded for robots that cling onto either of the two towers in the center of the field. More bonus points are awarded if alliance robots can suspend themselves from the robot clinging onto the tower.